
Soft Robotics is a field of robotics dedicated to the design and fabrication of soft robots. Soft robots are devices or machines made of elastic materials, such as elastomers, hydrogels, or polymers. By combining these materials with a mode of actuation, most commonly pneumatic although both electrical and chemical actuation are also being explored, these soft robots are able to perform a task. For the pneumatic soft robots, once a pressure differential is introduced to the pneumatic network a collection of internal chambers are pressurized in such a way to cause the actuation.
Typical ‘robots’ are composed of rigid materials actuated using electrical, hydraulic, or both inputs; this is beneficial if the task to be completed requires a high amount of force or power, a strong and durable machine, or a high level of accuracy. Soft robots, however, are highly beneficial for functions that require a delicate touch. An example could be a soft robot that can navigate a fallen building for search and rescue attempts, since the device will have little to no impact on its surroundings. Another great example witnessed from cinema but ideated from a research team at the Carnegie Mellon University by Professor Chris Atkeson is Baymax from the movie Big Hero 6. In this movie we see Baymax introduced as an assistive, health companion robot with a soft, pneumatic body so as to be non-damaging to human patients. The balloon-like structure of Baymax allows his body to deform upon impact of a foreign object, reducing the damage done to both him and the object.
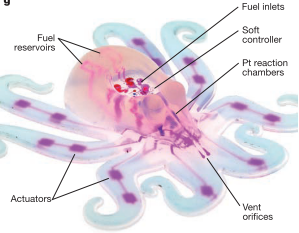
M. Wehner et al., “An integrated design and fabrication strategy for entirely soft, autonomous robots,” Nature, vol. 536, no. 7617, pp. 451–455, 2016.
In the Heart Valve Performance Laboratory, we are using soft robotics to create new prosthetic heart valves that provide a better alternative than the existing solutions. By spearheading the research with the combination of prosthetic heart valves and soft robotics, we can confidently say that we have achieved an industry first! The first Soft Robotic Prosthesis for the Aortic Heart Valve was designed and fabricated right here at the University of British Columbia Okanagan.
This new device is being developed to address an issue in patients with small aortic heart valves that require Aortic Valve Replacement surgery. Current mechanical and bioprosthetic heart valves are unable to provide either the hemodynamic abilities or an acceptable lifetime for the implantation. Since the cardiovascular system is, in essence, a pneumatic network, the Heart Valve Performance Laboratory utilized the fluid flow and pressure in order to actuate the soft robotic valve. Designing a reserve pneumatic network and actuating pneumatic network to work in tandem was the key to creating a prosthetic heart valve capable of increasing its internal diameter during systolic function of the heart. This work has been simulated in a computational environment and the actuation of the soft robotic valve has been achieved through many iterative attempts.